
최근 주목을 받고있는 딥러닝을 활용하여 여러 교통문제 해결을 하고있다.
- 첫째, Rode side Equipment를 활용하여 교통상황을 판단하는 사례
- 둘째, 교통의 독특한 특성인 시공간적 요소를 고려한 교통예측
- 마지막으로, 도시내의 교통흐름에 가장 큰 영향을 주는 교통신호에 활용되고 있다.
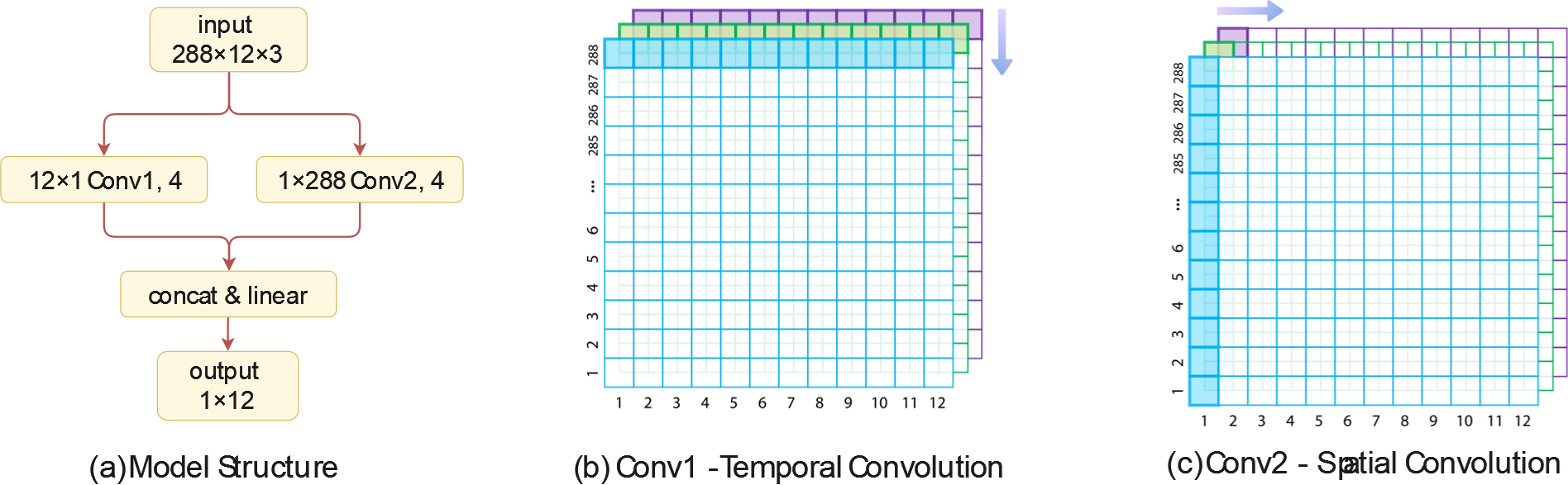
단기 트래픽 예측(속도, 부피, 지연, 여행 시간 및 기타 요인)은 과거 데이터 기능을 사용하여 모델을 생성하고 가까운 시일 내에 트래픽을 예측하는 데이터 중심 주제입니다. 지난 20 년 동안이 영역의 초점은 통계적 방법에서 신경망으로 옮겨졌습니다. 특히, 딥 러닝 구조를 기반으로하는 모델은 최근 단기 교통 예측에 대한 일련의 뛰어난 결과를 달성했습니다.
혁신적인 공간-시간 딥 러닝 모델에는 CNN (Convolutional Neural Networks)과 RNN (Recurrent Neural Networks)이라는 두 가지 유형의 모델 구조가 나타납니다. CNN은 컨볼 루션 계산과 관련된 피드 포워드 신경망의 한 유형입니다. CNN에 대한 연구는 1980 년대에 시작되었으며 생물학적 시각적 인식 이론은 구조 설계에 영감을 주었다. 계층화 메커니즘과 컨볼 루션 커널은 적은 계산을 사용하여 그리드와 같은 토폴로지 기능을 학습합니다. 대조적으로, RNN은 반복 셀을 통해 입력을 순차적으로 공급하여 출력을 계산하는 신경망의 한 유형으로, 순차적 데이터와 관련된 문제에 사용되었습니다.
LSTM (Long Short-Term Memory) 및 GRU (Gated Recurrent Unit)는 최신 RNN의 대표적인 구조입니다. CNN과 RNN은 컴퓨팅 성능의 빠른 발전으로 컴퓨터 비전, 자연어 처리, 의료 솔루션 처리 및 전송 연구에 적용되었습니다.
단기 교통 예측 문제의 경우, 기존의 많은 모델이 수정 및 조합을 통해 CNN 및 RNN 모델을 기반으로 개발되었습니다. CNN 제품군의 경우 얕고 깊은 유형의 구조가 파생되었습니다. 얕은 모델은 더 적은 CNN 레이어로 구성되어 트래픽 속도 및 흐름을 예측할 수 있으며, 더 깊은 CNN 모델은 잔여 신경망의 도입으로 트래픽 예측을 위해 생성됩니다. 반면에이 영역의 RNN은 두 가지 유형의 모델로 요약 될 수 있습니다. RNN 레이어 결합 모델과 구조적 수정 모델. 전자는 RNN 레이어를 결합하는 다양한 방법을 시도하지만 후자는 RNN 셀에 개념을 도입하여 모델을 개선합니다. 또한 CNN과 RNN의 구조적 결합은 공간적 특징과 시간적 특징을 모두 배우는 데 더 효과적인 것으로 보입니다.
By Wang Bo, Hai, Vu, and Inhi Kim Short-Term Traffic Prediction Using A Spatial-Temporal CNN Model With Transfer Learning, TRB, 2020, Washington DC
서로 다른 시간에 따른 오류 변화를 관찰하기는 어렵습니다.모델링 모델에서 테스트 세트의 RMSE 및 실제 트래픽 속도 분포를 보여줍니다. 12 개 위치는 시간에 따라 다른 변동을 나타내는 12 가지 색상으로 표시됩니다.


By Wang Bo, Hai, Vu, and Inhi Kim Short-Term Traffic Prediction Using A Spatial-Temporal CNN Model With Transfer Learning, TRB, 2020, Washington DC
현재 기술로 다양한 빅데이터(Big data)를 수집하는것이 가능해 진 후 교통시스템의 효용을 증대하기 위한 노력의 일환으로 많은 시도를 하고 있는데 교통신호제어 시스템도 그중의 하나이다. 이 논문은 딥마인드의 알파고에 적용된 알고리즘의 하나인 강화학습(reinforcement learning)을 적용하여 교통신호를 제어하는 방법론을 제시하였다.
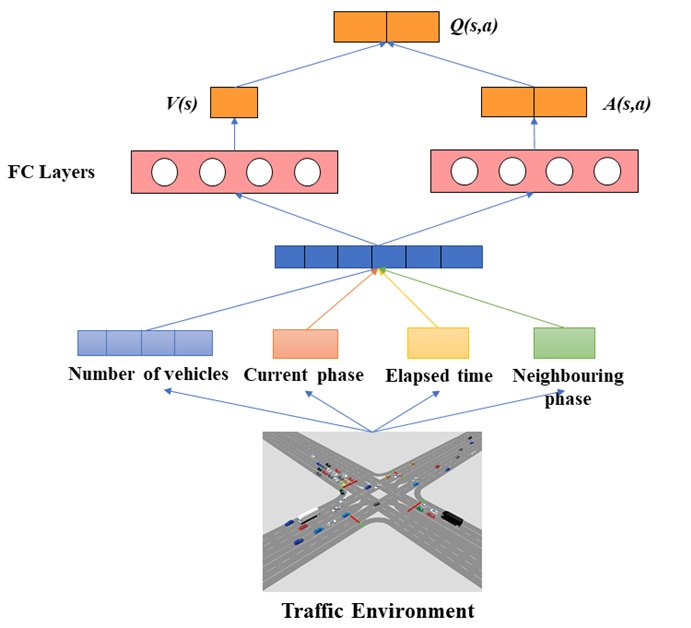
기본적으로 강화학습은 환경에 대응하는 반복적인 인터렉션을 통해 환경-행동 정책(State-action policy)를 개발하여 보상(Reward)을 최대한으로 높이는 결정을 취한다. 에이전트의 환경공간(state space)이 너무 크면 강화학습에서 함수근사(function approximators)를 사용하여 가치함수(Value functions)의 근사값을 취한다. 이 논문은 여기에 합성공 신경망(Convolutional network)를 접목시켜 deep Q-netwrok traffic signal control agent (DQTSCA)를 개발하였다. DQTSCA는 마이크로 시뮬레이션 VISSIM환경에서 강화학습을 사용하여 학습된 딥 합성공 신경망이다.
강화학습은 신호제어에 적합한 기술이다. 왜냐하면 에이전트는 교통신호제어기, 환경은 교통상태, 행동은 교통신호등으로 치환할 수 있기 때문이다. 이 논문에는 기존연구보다 더 확장된 정보를 바탕으로 교통상황을 더 잘 모사할수 있다고 주장하고 새로운 환경공간의 개념 즉, discrete traffic state encoding(DTSE)를 제안하였다. DTSE는 다양한 정보를 포함할 수 있고, 합성공신경망은 이 정보를 바탕으로 만들어 진다. DTSE는 합성공신경망이 더 정확한 교통정보를 받고, 유용한 특성을 뽑아내고 높은 수준의 환경 대표성(state representation)을 만들 수 있도록 해준다. 그런 후, 에이전트는 가장 높은 점수를 가지는 행동을 취함으로서 최적제어를 할수 있게 된다.
The framework of this research

Illustration of data acquisition devices at an intersection with four phases.

Dueling architecture
The geometry of the road network and the agent-based control framework for the four signalized intersections.

'Solution > Deep learning' 카테고리의 다른 글
| 딥러닝 기반 교통량 단기예측 (0) | 2020.04.18 |
|---|


